
Home Page Wed Oct 15 02:17:40 JST 1997
   Next: Matching between an image Up: Technical Details of PIXY Previous: Overview of PIXY system |
Star detection from an imageThe way of star detection is in a principle as follows. That is, a small circular region brighter than the background is regarded as a star, the coordinates of the center of gravity as the position of the star and the total amount of pixel value of the region as the brightness. Therefore, it is required to determine the background level and the threshold between a real star and noise exactly. The simplest way is to assume that the background level is equal wherever on an image and regard the average value of all pixels as the background. However, general photo images are inclined to be brightest in the center and dimmer in the circumference.
Nova Cas 1995 Photo: Seiichi Yoshida Cross section
Therefore, the background level should be expressed as a quadratic function of x,y:
This is called a flatfield function.
The parameters Accordingly, the process of star detection should be as follows.
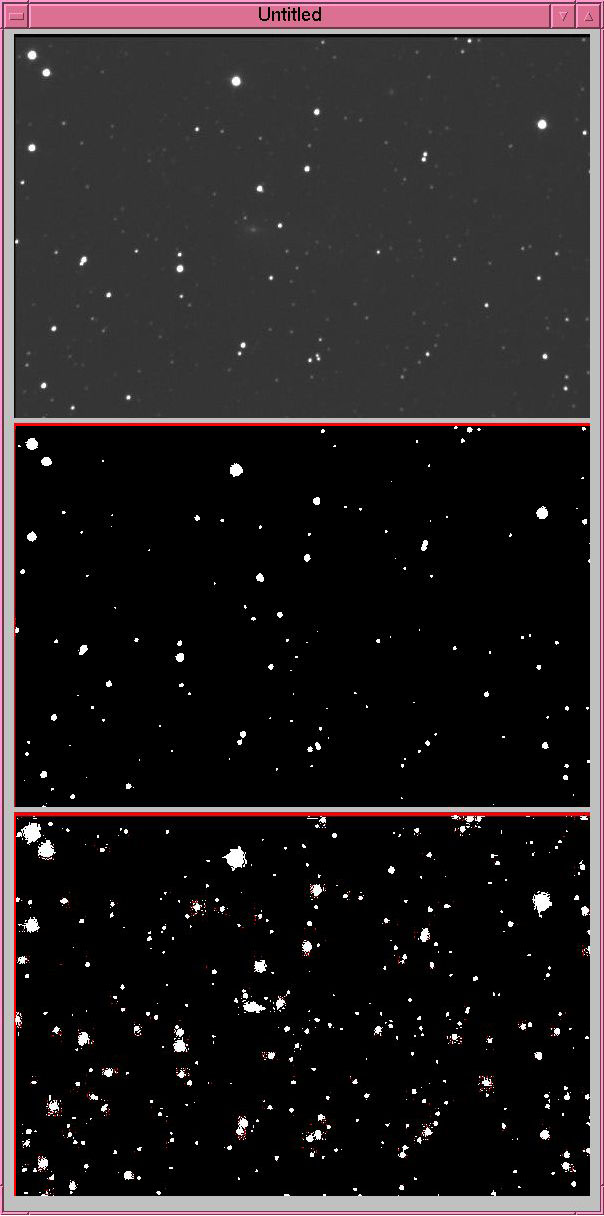
Then I tried to detect stars from some real images in the process mentioned above. The results are shown below.
Three images are put vertically. The top is the original. The middle shows detected stars when the preliminary flatfield function is obtained. Only pixels whose value is greater than the preliminary flatfield + the twice of the standard deviation are plotted. The bottom shows detected stars when the true flatfield function is obtained. The red pixels in the images are dark noise. At the step of the second image, though very faint stars are not detected, bright ones are almost all detected. And there are almost no noise. On the other hand, at the third step, the image is very noisy, which implies star detection has been failed. This experimentation shows that the preliminary flatfield function and the standard deviation produces better result. So the current prototype system omits the step 3, 4 from the process mentioned above to detect stars. In this case, the standard deviation is large because of bright stars' influence and very faint stars are not detected. However, it does not matter at all in order to obtain a map function, which can be calculated with some bright stars enough to be detected in this method. On the contrary, too many faint stars may only cause the enormous calculation. But considering to detect new objects automatically, this is a big problem to be solved in the future.
|

{kind=link}
{kind=link}
|
Next: Matching between an image Up: Technical Details of PIXY Previous: Overview of PIXY system |