
Home Page Tue Sep 2 14:15:44 JST 1997
   Next: Afterword Up: PIXY system Previous: Current progress |
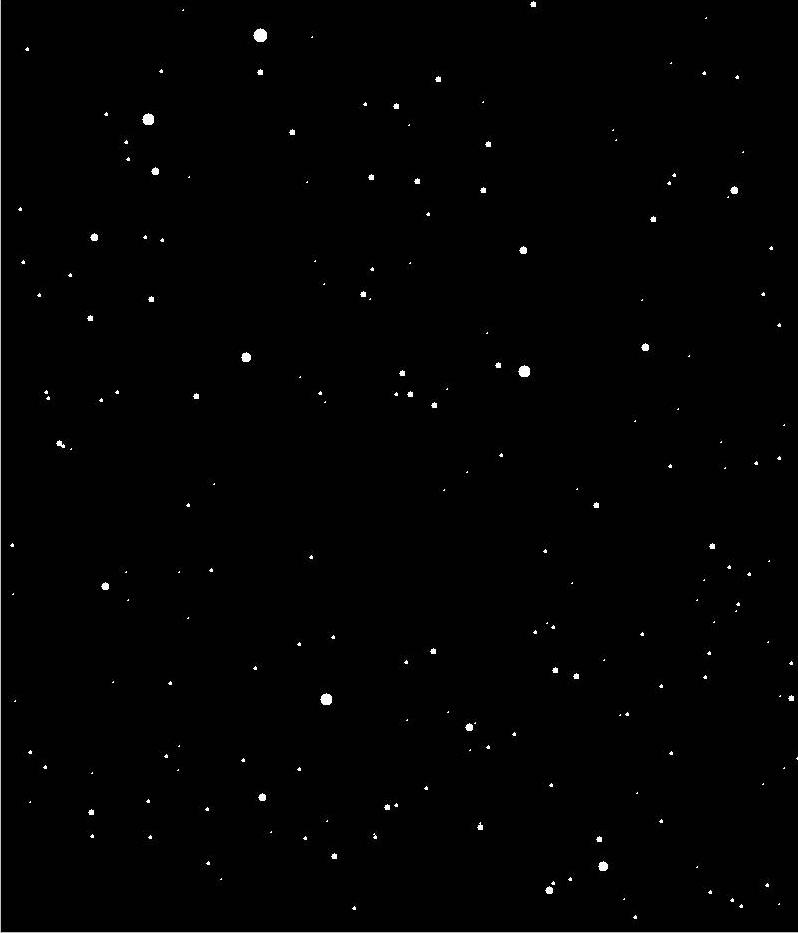
Experimental resultFinally here shows an experimental result of the prototype system, with a picture of Nova Cas 1995 (Figure 2).
The detected stars from the image are shown as Figure 3. 138 stars are detected. Not only true stars, some flaws of the film and a trianluar mark pointing to the nova are also recognized as stars.
It utilizes the Tycho catalog.
In this case, I know I took a picture of Nova Cas 1995, so I input
the R.A. and Decl. of the nova as the approximate direction.
The approximate width is about 1 deg by experience.
So the system extracts stars from
As a result of the matching, the following map function is obtained.
k is a rate to magnify,
After the map function is obtained, the system can output the R.A. and Decl. of the position clicked in the image, and show the input R.A. and Decl. is where in the image. This experiment produced a proper result. However there are some more problems and it takes some more time to publish this system on WWW. The big problems to be absolutely solved are these two things. The first problem is that matching takes so much time. This experiment took about three hours with PentiumPro 180MHz PC. Even with the approximate angle to rotate, which reduces the search space, it took several dozens of minutes. However it is mainly because the system is implemented in Java language. Before that, I made a experimental program in C++ language. Then I could get result within three minutes, though the target was artificial data, not a real image, and the number of stars were smaller, several dozens of stars.
The another big problem is that simetimes the map function is not
determined properly.
In this experiment, several candidates of map function such as
|


|
Next: Afterword Up: PIXY system Previous: Current progress |